How to Use Task¶
This tutorial will show you how to use existing task.
What Is Task¶
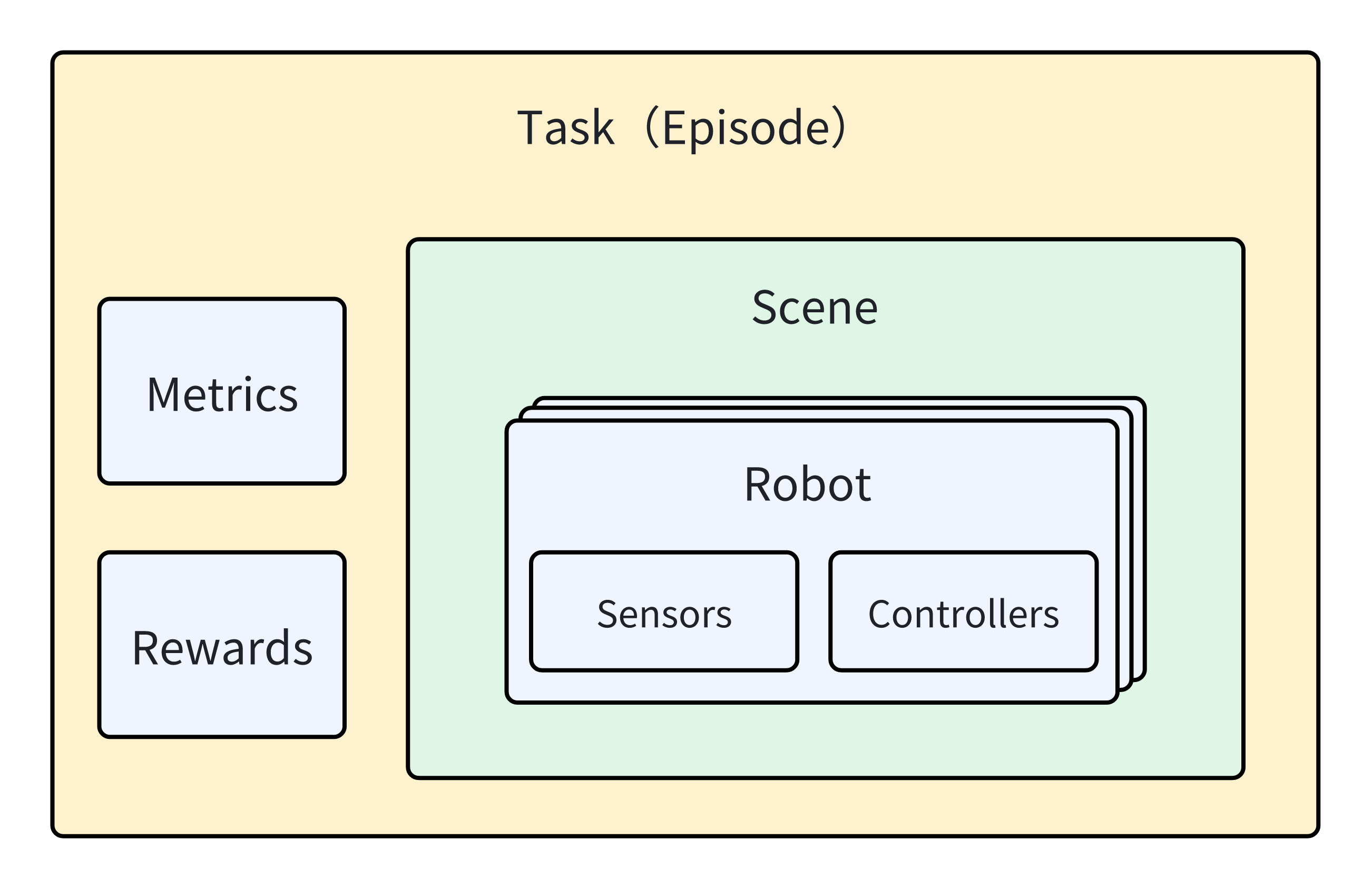
Task is a core concept within GRUtopia, defining what actions or objectives can be performed in a given environment. Each time a task is carried out, it is treated as an “Episode”, which is a specific instance of the task’s execution.
We have defined a base class for task along with several implementation subclasses.
Supported Tasks¶
The directory grutopia_extension/tasks/__init__.py contains a list of all available tasks:
from grutopia_extension.tasks import (
manipulation_task,
mobile_manipulation_task,
finite_step_task,
single_inference_task,
social_navigation_task,
)
We can also review the configuration of each individual task in grutopia_extension/configs/tasks/__init__.py.
How to Use a Task¶
To use existing tasks within GRUtopia, you simply need to include them in the configuration settings as follows:
...
config = Config(
simulator=SimConfig(physics_dt=1 / 240, rendering_dt=1 / 240, use_fabric=False),
task_config=SingleInferenceTaskCfg(
episodes=[
SingleInferenceEpisodeCfg(
scene_asset_path=gm.ASSET_PATH + '/scenes/empty.usd',
scene_scale=[0.01, 0.01, 0.01],
robots=[h1_1],
),
],
),
)
...
This configuration is excerpted from GRUtopia/grutopia/demo/h1_locomotion.py, which is a demo where a robot moves at a specified speed and direction. It is a task that consists of a single episode and does not terminate automatically, which is suitable for debugging the robot, controller, or sensor.